Event cameras mimic the human eye to allow robots to navigate their environment, and a new approach helps minimize computational costs.
Event cameras mimic the human eye to allow robots to navigate their environment, and a new approach helps minimize computational costs.

A newly built biohybrid wing could lead to new drone designs, and reveals that wing folding is key to efficient flight.
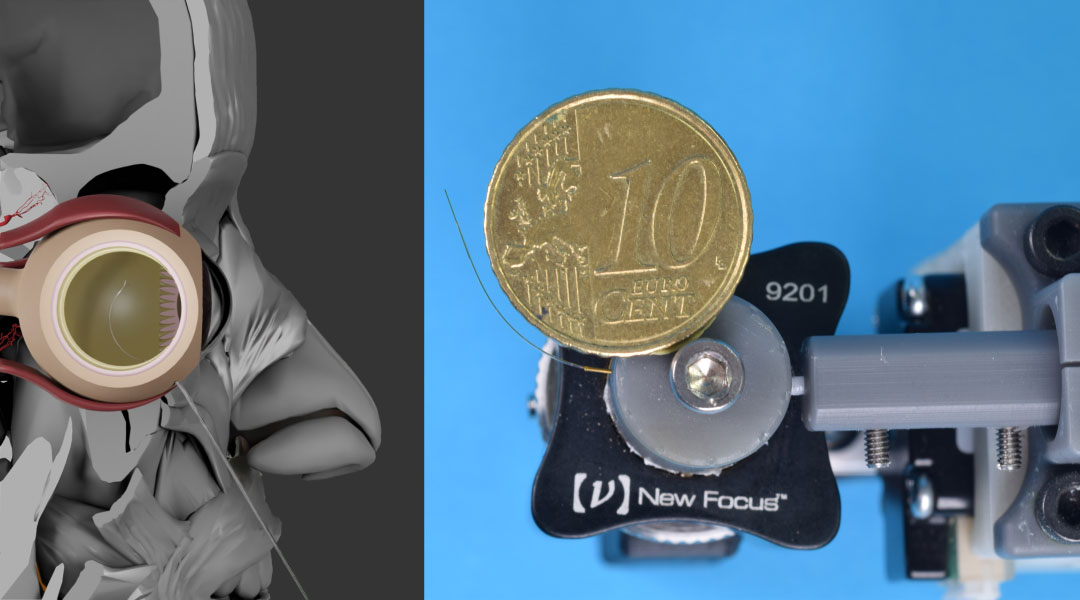
Scientists have high hopes for a tiny glass tube robot in improving the capabilities and safety of robots used in non-invasive microsurgeries.

Researchers use machine learning techniques to decrease the workload of surgeons.

Researchers take a lead from seahorse tails to develop grasping robots that could help clear up trash from our oceans.

A new battery design not only provides energy,not only provides energy, but facilitates automatic surfacing and diving mechanisms in electronic, underwater equipment.
Rigid elements are holding soft robots back from their full potential, and new research suggests swapping in fluid-based systems.
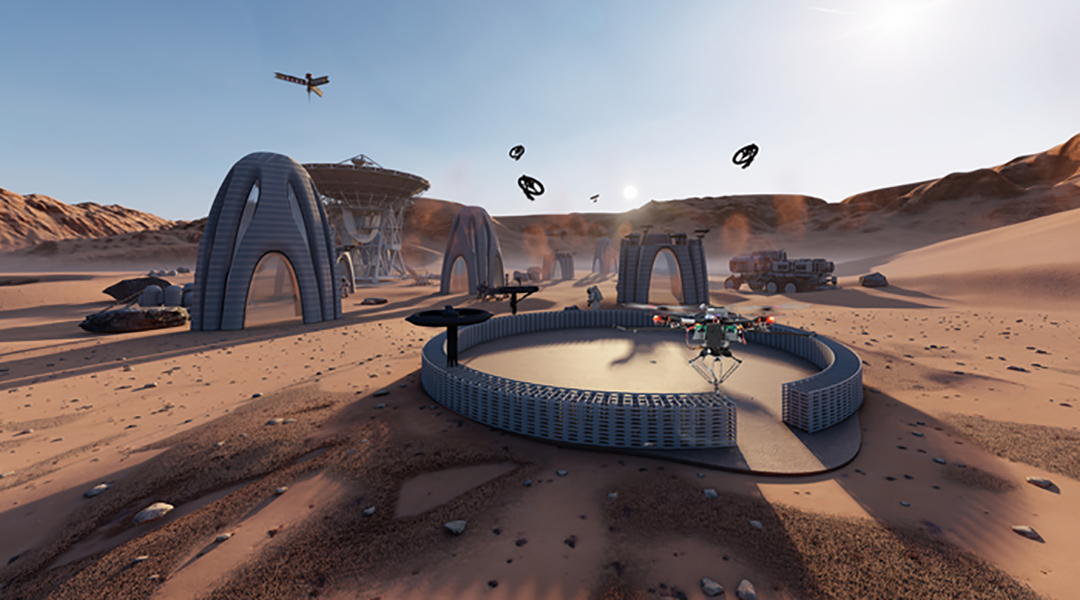
Modeled after nature’s builders, a swarm of 3D printing drones work together to build large structures while in flight.

Borrowing its shape from a disposable to-go cup lid, this new drone wing adapts to its surroundings all on its own.
Fusing data from multiple moving cameras helps robots generate realistic 3D maps of their surroundings.


 Micron-sized hidden dimensions could solve two of physics’ deepest puzzles
Micron-sized hidden dimensions could solve two of physics’ deepest puzzles
 Turning Periods into Power: Menstrual Blood a Valuable Resource for Medical Diagnostics
Turning Periods into Power: Menstrual Blood a Valuable Resource for Medical Diagnostics
 Surfactants Steer Supraparticle Structure
Surfactants Steer Supraparticle Structure
 Bone loss in obesity traced to gut microbiota
Bone loss in obesity traced to gut microbiota
 Edible electronics realize safe, complex monitoring devices
Edible electronics realize safe, complex monitoring devices
 Fermilab Confirms Muon g-2 Measurements
Fermilab Confirms Muon g-2 Measurements