A transparent underwater robot camouflages itself to explore the ocean, reducing encounters with delicate sea life.

A transparent underwater robot camouflages itself to explore the ocean, reducing encounters with delicate sea life.
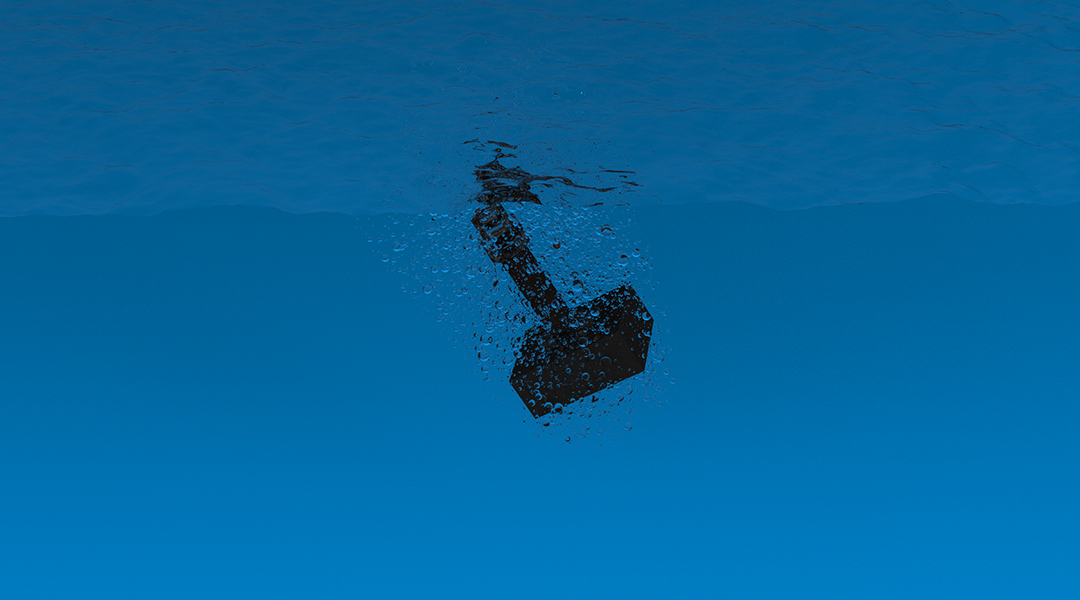
DeepStalk does away with a hard shell for a soft body and integrated parts to function under pressure and explore the deep sea.
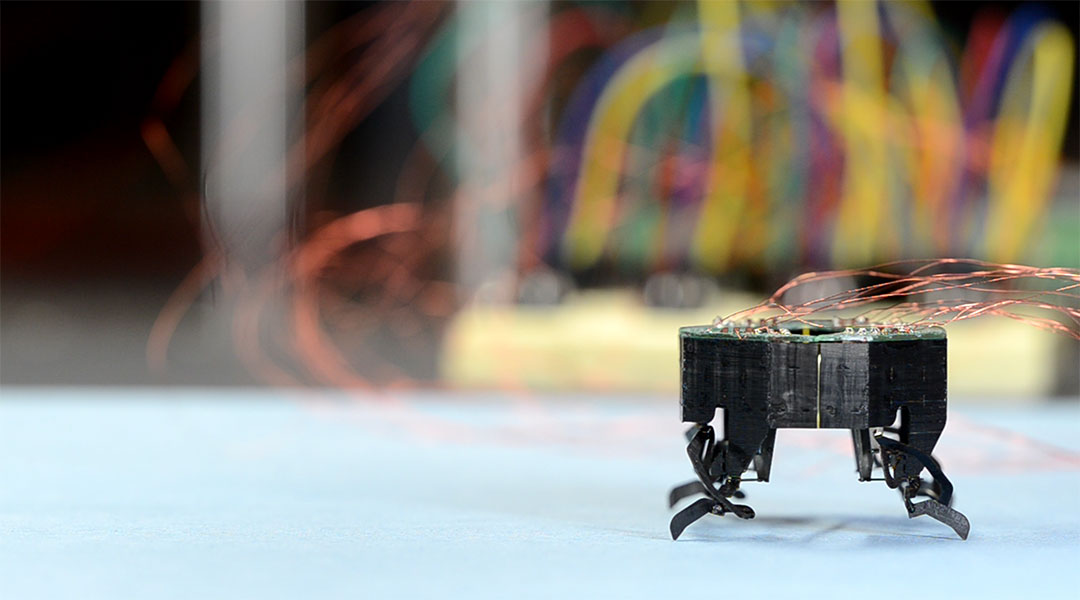
A miniature, shape-changing robot could have applications in search and rescue, scuttling across tight and cluttered environments like an insect.

Groundbreaking soft sensors enable robots to both see and feel, paving the way for robots that can autonomously interact with and understand their environment.

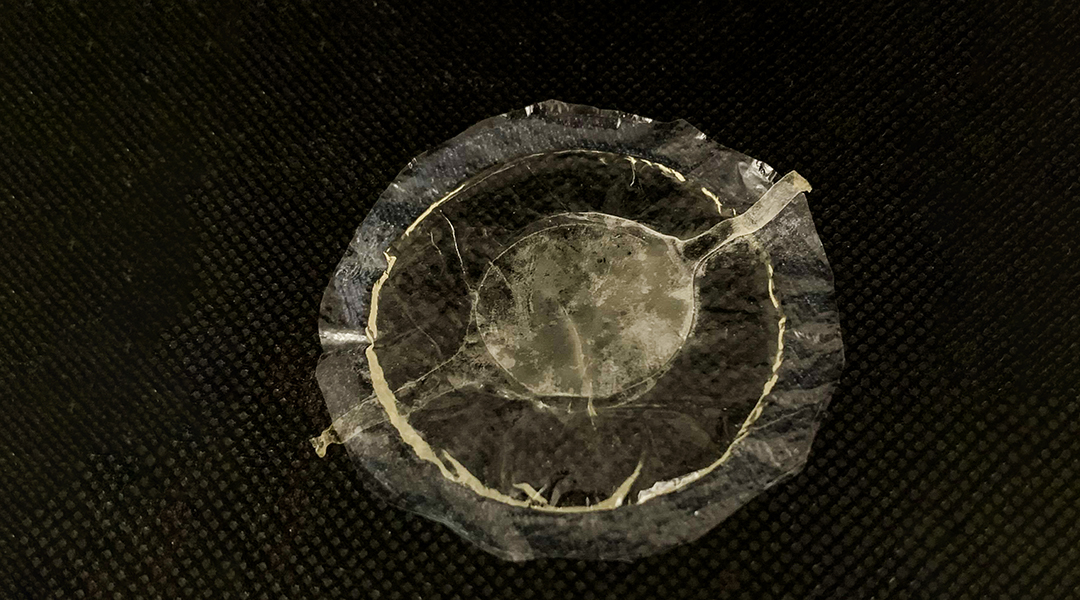
A kirigami-inspired gripper that can pick up water droplets, microfibers 40 times thinner than a human hair, and objects 16,000 times its own weight.

It may sound like something straight out of an anime, but TRADY is a rotor-based flying robot that can combine to boost its strength and capabilities.
AI is changing the labor-intensive process of manual cell counting, offering improved accuracy, efficiency, and a door into new scientific applications.
Scientists have developed a method to produce millimeter-scale soft robots by chemically binding hundreds of microrobots together.
A soft, biodegradable actuator that could drive the motion of biodegradable robots and a future in symbiosis with human operators.

Is AI that predicts which paintings are memorable and famous, regardless of content, style, or context, a threat to creativity or tool for positive change?
 New theory suggests gravity is not a fundamental force
New theory suggests gravity is not a fundamental force
 French WEST reactor breaks record in nuclear fusion
French WEST reactor breaks record in nuclear fusion
 Quantum entanglement visualized for the first time ever
Quantum entanglement visualized for the first time ever
 Higgs boson may be driving the Universe’s expansion
Higgs boson may be driving the Universe’s expansion
 An anti-inflammatory peptide may hold the key to low-back pain relief
An anti-inflammatory peptide may hold the key to low-back pain relief
 Could a nuclear explosion set Earth’s atmosphere on fire?
Could a nuclear explosion set Earth’s atmosphere on fire?
 Black hole images deliver a deathblow to alternative theory of gravity
Black hole images deliver a deathblow to alternative theory of gravity
 The Road to Better Presentation of Data: The Do’s and Don’ts
The Road to Better Presentation of Data: The Do’s and Don’ts
 The dramatic story behind general relativity’s Nobel Prize snub
The dramatic story behind general relativity’s Nobel Prize snub
 Researchers take a glimpse at the structure of rare tetraquarks
Researchers take a glimpse at the structure of rare tetraquarks