Synthetic microswimmers capable of controlled motion at the micro scale can create exciting new opportunities for applications in microfluidics, particle manipulation, materials assembly, targeted drug delivery, and non-invasive microsurgery. Acoustically-induced swimmers can become useful in medical settings due to their ease of operation, non-invasive nature, and their ability to generate large propulsive thrust; however, to date, the ability to precisely control their navigation has not been shown.
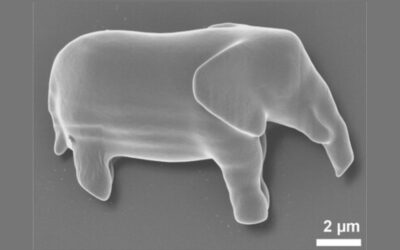
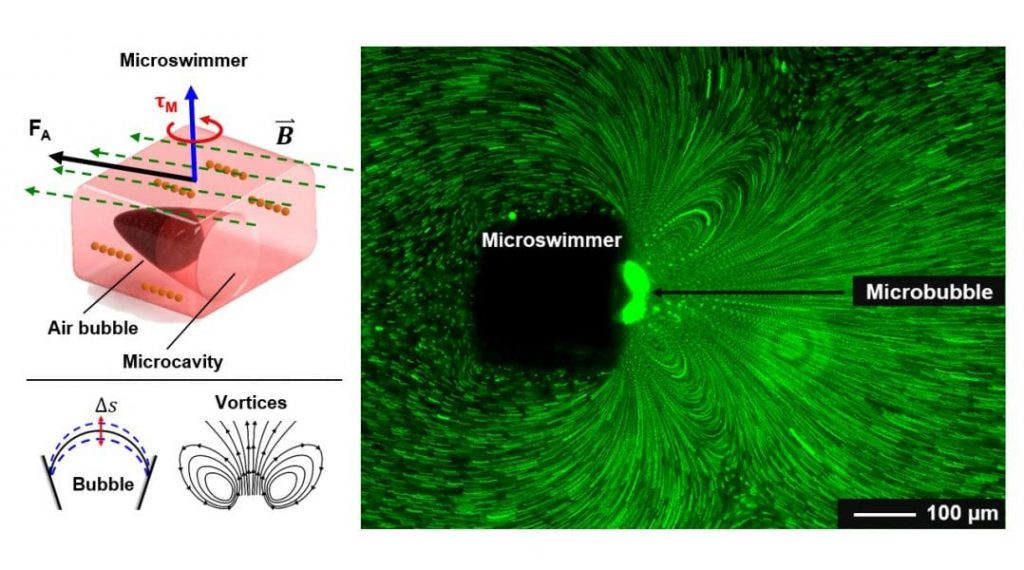
 Dr. Daniel Ahmed and colleagues from the Institute of Robotics and Intelligent Systems at the ETH in Zürich, Switzerland, have now reported their new findings in synthetic microswimmers in a recent communication in Advanced Materials Technologies. The authors describe a soft microswimmer design strategy that uses a combination of acoustic and magnetic fields to demonstrate precise manoeuvrability. When the microswimmers are submerged in a liquid chamber, a stable microbubble is spontaneously trapped within the microcavity. Upon exposure to an acoustic field, the trapped bubble will oscillate.
Dr. Daniel Ahmed and colleagues from the Institute of Robotics and Intelligent Systems at the ETH in Zürich, Switzerland, have now reported their new findings in synthetic microswimmers in a recent communication in Advanced Materials Technologies. The authors describe a soft microswimmer design strategy that uses a combination of acoustic and magnetic fields to demonstrate precise manoeuvrability. When the microswimmers are submerged in a liquid chamber, a stable microbubble is spontaneously trapped within the microcavity. Upon exposure to an acoustic field, the trapped bubble will oscillate.
As the frequency of the acoustic waves approaches the resonance frequency of the bubble, it will oscillate at its maximum amplitude, resulting in a pair of strong, counter-rotating vortices. These generated vortices are responsible for propulsion. Subsequently, the superparamagnetic particles are aligned in the form of chains inside the swimmer’s polymer body, enabling a controlled motion by reacting to an externally applied magnetic field. Utilizing both fields allows a swimmer to navigate with precise maneuvering capabilities. Moreover, the combination of both fields overcomes limitations encountered by single actuation techniques and is a system capable of integration into clinical settings.
The authors believe that these results will create new opportunities for precise assembly of materials, targeted drug delivery, and non-invasive microsurgery.
Artificial microswimmers capable of controlled motion for targeted drug delivery and non-invasive microsurgery.
This is text was kindly provided by the Authors.