Microfluidic systems will be required for the delivery and transport of fuels and vital reagents in autonomous soft robotic systems, but there has been little consideration given to how deformation of these systems will impact fluid dynamics. Furthermore, sensing (tactile and motion) will be required in autonomous soft robots. Soft lithography has enabled the efficient production of microfluidic devices, which have applications in various fields including diagnostics, analytical chemistry, microelectronics, and soft robotics. While most of these applications use devices with static microchannel networks (with fixed dimensions), the devices used in soft robotics have dynamic microchannel networks (i.e., the channel dimensions change during operation of the robot). Understanding the flow within these channel networks will enable soft robotic systems with distributed fluid transport properties.
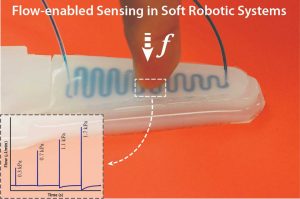
The existing strain or curvature sensors for soft actuators predominantly use liquid metals or piezoresistive materials and often require dedicated electrical instruments for transforming the electrical signal. In a recent paper published in Advanced Intelligent Systems, Stephen A. Morin, Sangjin Ryu, and colleagues at the University of Nebraska–Lincoln used the changes in the fluid transport properties caused due to the change in channel dimensions of the fluidic networks to sense touch or actuation, thus eliminating the need for extra equipment and collocating multiple functionalities.
The ability to collocate multiple functionalities will create new opportunities for the fabrication of “smart” soft robotic systems. Future challenges include the ability to seamlessly interface multiple actuation mechanisms and functionalities within a single robot.
“The presented work is a simple approach to imbibe sensing capabilities into soft actuators that could potentially lead to smart, autonomous soft robots”, says Abhiteja Konda, lead author of this paper.
Kindly contributed by the authors.