The field of soft robotics continues to see a plethora of new materials and devices. Soft robotics is the technology of creating materials that can perform the mechanical function of traditional robots, without the need of multiple components such as cogs, joints, pistons, etc. In other words, materials which can change shape when stimulated, akin to biological tissues such as muscles.
One of the main drivers for such robots is the desire to deploy such machines in currently inaccessible places such as the human body, for clinical purposes, and other difficult-to-access environments. There is of course a size limitation to such applications, and so far soft robotics have managed to get down to the centimeter scale, but the millimeter scale has been still out of reach, until now.
Prof. Tommaso Ranzani from Boston University, as well coworkers from the Wyss Institute for Biologically Inspired Engineering at Harvard, and the University of California Santa Cruz, develop a multi-layered robotic Australian peacock spider from what they call a “microfluidic origami for reconfigurable pneumatic/hydraulic”, or MORPH, system. The origami part of this system is plane to see in the figure below, detailing the wonderful structure of the device as if, one can imagine, it could be made from folding paper.
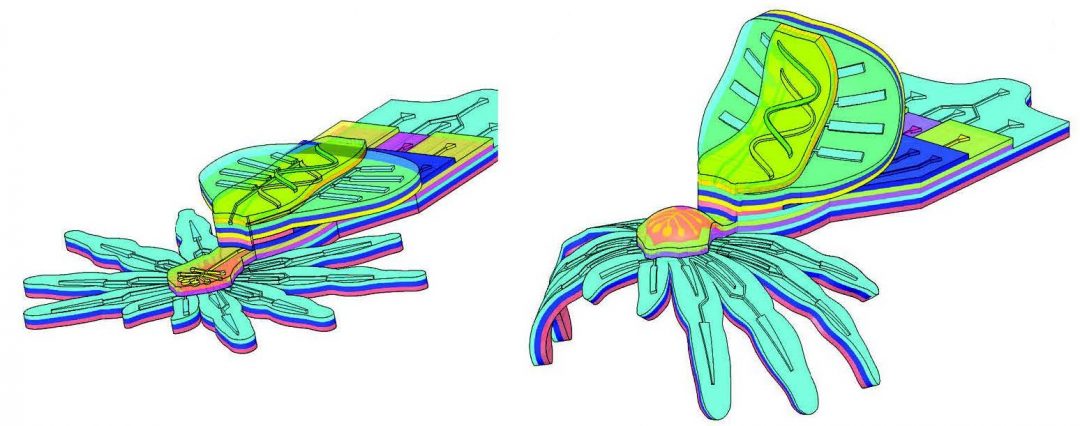
What this figure also demonstrates is the functionality of the soft “spider” to change from a 2D structure to a 3D structure after injection-induced self-folding.
The spider is made entirely from silicone, built into 12 layers, with channels throughout the structure. When fluid is injected into these channels, the build-up in pressure allows for multiple biomimetic movements; the legs of the spider can straighten—either at the hips or knees—and when pressure is relieved, the legs bend. The jaws are also able to move and, mimicking the real-life spider, the abdomen also has similar channels allowing it move up and down. This is demonstrated in the two videos below.
The main benefit of this soft robotic spider is that no electrical input is needed, which is a common stimuli for other soft robotic materials. This novel MORPH technique can hopefully pave the way for a whole range of soft devices able to perform complex and intricate tasks in spaces which currently are difficult to access without causing damage or being overly invasive.