Targeted drug delivery is an increasingly hot topic when it comes to finding more efficient and sight-specific therapeutics. An area of this field which is gaining traction is the idea of using nano- or micro-sized robots to carry therapeutic drugs or cells to a specific biological target in a patient.
In an article published in Advanced Healthcare Materials, the design and implementation of capped microrobots is demonstrated, which have the ability to use a “pick-and-drop” method for therapeutics delivery.
Taking inspiration from the way in which living microorganisms move through fluidic environments, these capped microrobots are designed to move in a corkscrew motion when subjected to a rotating magnetic field (RMF).
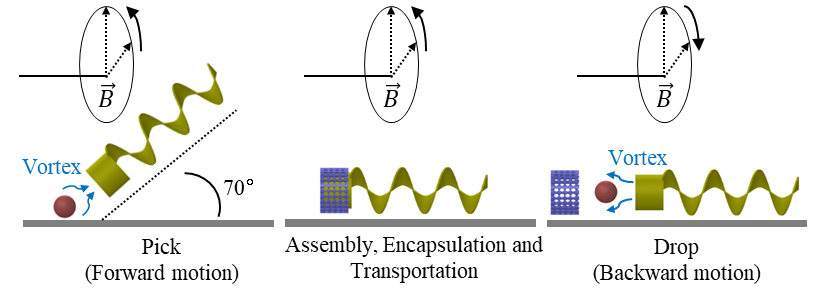
The concept is simple, and shown in the figure to the left; at the “pick” stage, a magnetic corkscrew tipped with a container creates a vortex which “sucks up” the drug or cell when subjected to a counter-clockwise RMF. The microrobot’s container is then encapsulated with a non-magnetic cap, where, under the RMF, it is able to move forwards or backwards towards the desired target. Once at this target and at the “drop” stage, a clockwise RMF is applied, causing another vortex which times “blows out” both the cap and the therapeutic, allowing for targeted drug delivery.
Furthermore, the porous nature of the cap allows the microrobot to act as a scaffold for therapeutic cells. Olfactory receptor neuron (ORN) cells were also successfully loaded onto the microrobot and transported and deposited successfully at targeted sites on a rat brain slice. This in vitro experiment demonstrated these microrobots’ biocompatibility and non-cytotoxicity.
This research holds potential for in vivo experimentation, and the fact the microrobots can be controlled by external RMFs, has the advantage of it demonstrating a non-invasive form of targeted drug delivery.