Active control of adhesion by mimicking the smart and switchable properties of gecko toe pads can make the gripping, movement, placement, and release (pick and place) of lightweight, delicate, thin, and flat objects, such as a silicon wafers possible. This is acheived by using tunable surface topographies that respond to external cues, such as heat, light, or magnetic fields.
In their recent article in Advanced Materials, Antal Jákli, Boxin Zhao, and colleagues from Kent State University, USA, and the University of Waterloo, Canada, report the use of cross-linked networks of liquid crystal polymers (LCNs) to regulate adhesion through stimuli responsive back-scrolling and self-peeling (processes which mimic the motion of gecko toe pads) to design a multi-legged gecko gripper.
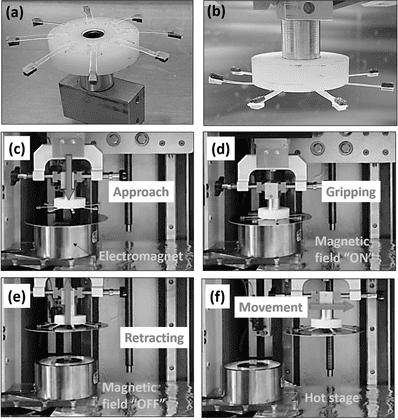
The researchers used a hybrid nematic side-chain LCN cantilever topped with a film-terminated fibrillary adhesive to make an effective gecko gripper, as shown in the image. They attached small magnetic patches to the upper side of cantilevers in order to adjust the preload stress by applying an attractive magnetic field created by an electromagnet underneath the sample. Release of the objects was triggered by temperature-driven bending of the LCN cantilevers, which caused the adhesive patch to peel off.