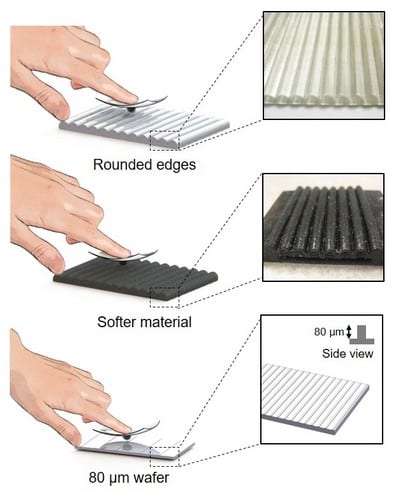
Surface scanning across gratings of various features. Inset shows the magnified images of the actual materials.
Our sense of touch is crucial for object recognition and manipulation. However, this is especially challenging to replicate in artificial systems. To mimic our skin, artificial sensor are required to detect mechanical stimuli in multiple directions, including normal and shear forces. A simple wearable artificial sensor system that has this capability will greatly benefit implementation in medical, social, and assistive robotics as well as users suffering from sensory neuropathy.
In their recent article in Advanced Materials Technologies, Prof. Chwee Teck Lim and his team from the National University of Singapore report a wearable liquid-embedded microfluidic tactile sensor capable of haptic perception. The sensor is soft, thin, flexible, and stretchable, allowing direct adhesion to skin. The sensor comprises tiny rubber protrusion filled with conductive liquid metal. Subsequently, normal or shear forces acting on the sensor result in unique deformations that can be measured electrically. As a result, different surface features such as contour changes, object stiffness, and textural roughness can be differentiated with their sensor. In fact, surface changes less than 80 µm can be discriminated using their sensor, a resolution that is comparable to our skin.
An excellent example to demonstrate its utility is through the recognition of Braille characters. By using the sensor to scan across a Braille character, the signal was processed in real-time to reveal the actual corresponding letter. The versatility of the sensor presents an excellent potential for applications in prosthetics, artificial limbs, or robotics.