Researchers in Singapore have developed a strain-sensing actuator that has potential to be used within rehabilitation and diagnostic devices for patient mobility and dexterity. By combining a strain sensor with an air-controlled movement actuator in a soft robotic device, patient mobility can be both tested and aided as part of rehabilitation physiotherapies. A prototype device demonstrated here in the form of a soft, flexible, and robust sensor–actuator glove to assist and detect finger movement. This advantages of this device over traditional hand rehabilitation robotic devices are the small size, and softness, as existing devices tend to be bulky, rigid, and uncomfortable. The sensor–actuator is simple to produce, and shows excellent sensitivity even at high displacement.
Researchers in Singapore have developed a strain-sensing actuator that has potential to be used within rehabilitation and diagnostic devices for patient mobility and dexterity. By combining a strain sensor with an air-controlled movement actuator in a soft robotic device, patient mobility can be both tested and aided as part of rehabilitation physiotherapies. A prototype device demonstrated here in the form of a soft, flexible, and robust sensor–actuator glove to assist and detect finger movement. This advantages of this device over traditional hand rehabilitation robotic devices are the small size, and softness, as existing devices tend to be bulky, rigid, and uncomfortable. The sensor–actuator is simple to produce, and shows excellent sensitivity even at high displacement.
Using the sensor–actuator glove, the researchers were able to induce and measure bending of the index finger. Cyclical assisted bending showed excellent reproducibility in the sensor signal. As well as assisted bending, the researchers also measured the sensor deformation under normal finger bending. Under normal circumstances, voluntary finger bending produced a higher signal, as the finger is bent more than when forced to bend by the actuator. This enables the device to be used to determine the stiffness of the finger, which will be useful in determining dexterity in stroke patients, as well as several other conditions affecting mobility and dexterity.
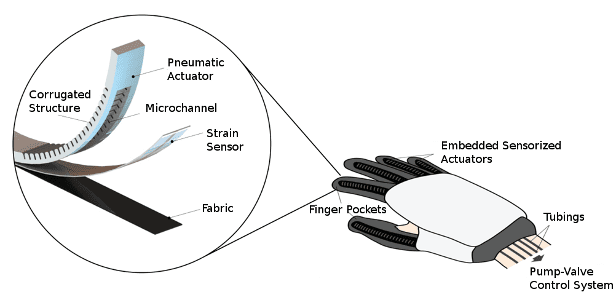
The soft robotic device consists of a flexible pneumatic actuator formed of molded silicone rubber, fixed to a conducting sensor substrate. The pneumatic actuator contains an air gap along its length, and the corrugated structure of the actuator allows it to bend under high air-pressure within the gap. The sensor is constructed from conductive silver nanoparticle ink screen-printed onto a silicone elastomer base. The mesh screen leads to a micro structure of short pillars, which lead to the excellent performance of the sensor under strain and deformation. is detected due to changes in the resistance of under strain. The pillar structure maintains the conductivity, ensuring that continuous measurement is possible, while also maintaining integrity of the sensor even after repeated stretches.