Microswimmers are promising tools to perform tasks at the small scale, making medical operations less invasive. Furthermore, robotic microswimmers require biocompatible actuation mechanisms in order to be used for biomedical applications. Motile cells such as sperm cells are attractive as propulsion sources or as functional components to realize complex tasks in the body, when combined with artificial components.
Sperm cells are attractive as propulsion sources or as functional components in robotic microswimmers to realize complex tasks in the body
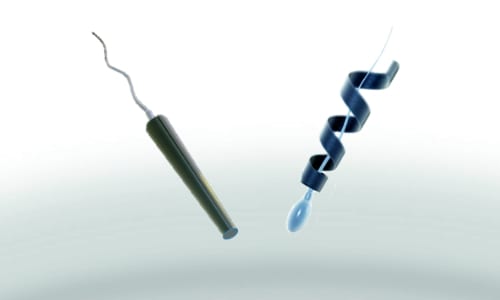
A recent Progress Report published recently in Advanced Materials, Veronika Magdanz, Mariana Medina Sánchez, and co-workers summarize the different fabrication routes for creating “spermbots”, which are characterized by an optimal interaction between the artificial component and the sperm cell. Either motile sperm cells propel tiny magnetic microtubes forward (tubular spermbots) and are guided by external magnets, or else immotile sperm cells are captured and driven by microhelices, which are actuated by an external rotating magnetic field (helical spermbots).
The recent advances in the field of tubular and helical spermbots are described. The current challenges and factors influencing the performance of sperm-microrobots are discussed, along with current and potential applications. Crucial requirements for in vivo applications include imaging and control, as well as the removal/degradation of the synthetic components after use. Particular applications include new assisted-fertilization methods and drug delivery for the treatment of diseases in the female reproductive tract.
Kindly contributed by the authors.