Today’s robots can be intelligent and tough and are already helpful to humans in many ways. There remain a lot of scenarios, however, where traditional robots cannot function well. For example, robots often are made of rigid materials, such as alloys and plastics, which make them vulnerable to fracture and their motility becomes limited in confined spaces or on rough terrains.
To solve this problem, a group of researchers at Dartmouth developed a miniature robotic bug that has a flexible body, is easily maneuverable, can crawl on different terrains and through narrow spaces, and can be completely flattened without damaging its functionality.
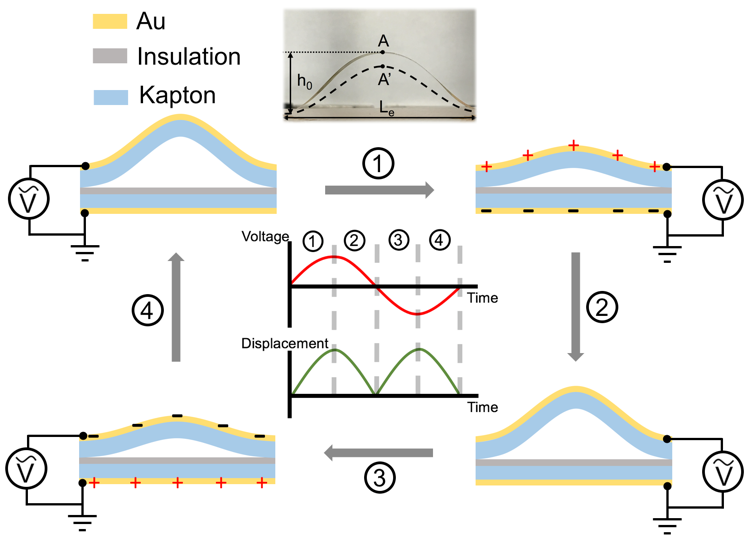
These unique capabilities are achieved through a combination of innovative design and cutting-edge transducer materials. The robot is built using thin polyimide films that can be actuated by electrostatic force which is ubiquitous in our daily life. The actuator, which makes up the body of the robot, has a three-layer sandwich structure with the top layer buckled up to form an arch shape.
By supplying an AC voltage to the top and bottom films, the buckled top film will deform periodically, thus converting electrostatic potential to kinetic and elastic energy. Its speed can be controlled by the amplitude and/or frequency of the input AC voltage, and by connecting two individually-controlled units as “legs”, the robot can be easily steered and maneuvered through many different complex environments.
“Due to its thin-film-based designs for both buckled light-weight structure as well as powerful actuation, the robotic bug is flexible enough to crawl through narrow spaces, quickly maneuver through various landscapes and resilient enough to recover after being crushed,” said Congran (Billy) Jin, an engineering Ph.D. candidate at Dartmouth and first author on the paper.
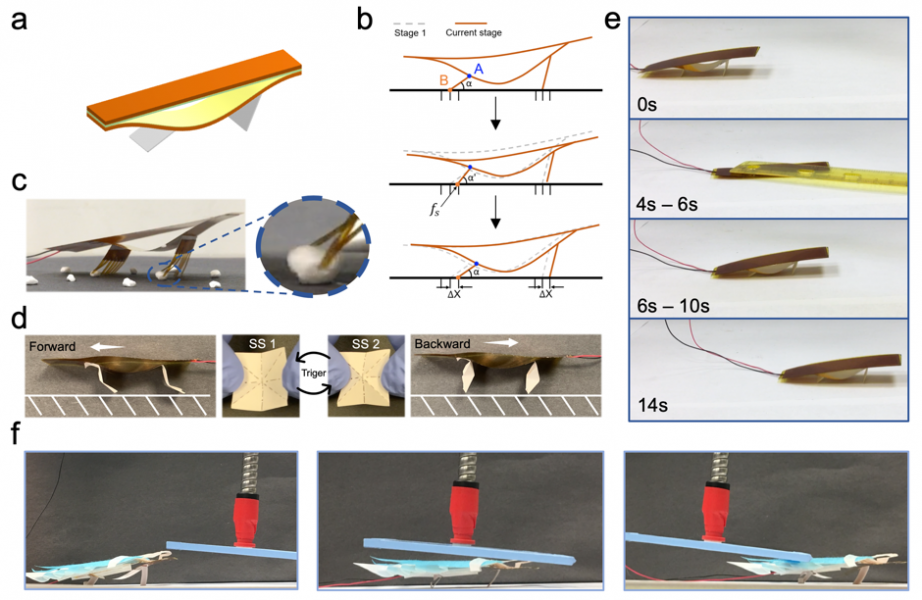
“The robot is also highly tunable through some ‘special’ design modifications,” said Zi Chen, assistant professor of engineering at Thayer School of Engineering at Dartmouth. “For instance, we added bi-stable origami-inspired legs so that it can move either both forward or backward when the legs switch between the two mechanically stable states. Alternatively, by creating a certain cutting pattern on the legs, we can significantly increase its ability to overcome small obstacles.”
This simple yet innovative approach produced a highly maneuverable, flexible robot that not only can go to places where traditional rigid robots cannot, but also is “immune” to mechanical crushes. This unique robotic bug may pave the way towards a variety of potential applications in such areas as detection/inspection, search-and-rescue, and disaster relief.
Written by: Congran Jin and Zi Chen
This project was jointly led by Professor Zi Chen and Professor John X.J. Zhang from Thayer School of Engineering at Dartmouth, and Professor Jinhua Zhang from Xi’an Jiaotong University, China.
Research article available at C. Jin, et al. Advanced Intelligent Systems, 2020, doi.org/10.1002/aisy.201900162