 Although the idea of making airfoils morphable is not new, there have been technical challenges with respect to materials, designs, and actuators to make such wings a reality. Conventional, hard material-based morphable airfoils require complex structures and materials to change shapes or configurations, and they are often heavy with their use of dense materials/structures. Recent advances in soft robotics are working toward solutions to some of these challenges that are not easily solved with rigid structures. The materials used in soft and squishy elastomer-based robots usually have mechanical attributes such as low mass, high toughness, and high strain at failure. These material properties are enabling a range of new or improved capabilities, such as manipulation/dexterity, locomotion, camouflage, origami-like configurability, energy-efficient bending, and mechanical resilience. Nonetheless, the concepts for applying these material systems to aerodynamics have remained largely unexplored.
Although the idea of making airfoils morphable is not new, there have been technical challenges with respect to materials, designs, and actuators to make such wings a reality. Conventional, hard material-based morphable airfoils require complex structures and materials to change shapes or configurations, and they are often heavy with their use of dense materials/structures. Recent advances in soft robotics are working toward solutions to some of these challenges that are not easily solved with rigid structures. The materials used in soft and squishy elastomer-based robots usually have mechanical attributes such as low mass, high toughness, and high strain at failure. These material properties are enabling a range of new or improved capabilities, such as manipulation/dexterity, locomotion, camouflage, origami-like configurability, energy-efficient bending, and mechanical resilience. Nonetheless, the concepts for applying these material systems to aerodynamics have remained largely unexplored.
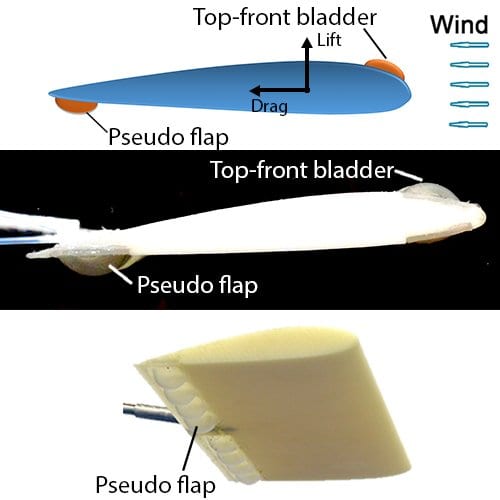
The Mazzeo Research Group, a team focusing on soft actuation, disposable electronics, and centrifugal processing at Rutgers University, has recently begun studying the aerodynamic responses of airfoils with embedded elastomeric sections. By controlling the inflation of stretchable and tough pneumatic bladders of silicone at specific locations of three-dimensionally (3-D) printed airfoils, experiments carried out in wind tunnels demonstrated capabilities of manipulating aerodynamic lift and drag. At a constant angle of attack, a pseudo flap deployed on the bottom portion of an airfoil near the trailing edge was able to increase lift by 20%-300%. In addition to manipulating lift and drag, another design with an inflatable region near the leading edge of an airfoil increased lift and the stalling angle at high angles of attack (>12°). To the authors’ knowledge, this work is the first to describe continuously tunable (i.e., not binary states of being either inflated/deployed or deflated/undeployed) fluid-soft material interactions for both lift and drag on airfoils with inflatable actuators.