In this study, researchers investigate a novel class of materials for realizing soft robots: flexible cellular solids impregnated with wax. Because traditional robotic systems utilize distributed, rigid components which limit a robot’s range of motion and ability to conform to complex environments, engineers have recently turned their efforts toward developing devices with continuously deformable structures to expand the capabilities of existing systems.
Wax-coated cellular solids are interesting for this purpose because they exhibit both rigid, load-bearing and morphable, compliant states. These states are attained by thermally tuning the state of the wax, while the cellular solid (such as an open-cell polyurethane foam) serves as a scaffold. For soft robotic applications, this composite exhibits a number of favorable characteristics including: the ability to realize considerable volumetric and shape changes, and subsequently regain the original shape even after large deformations (due to the reversible buckling of local structures); self-healing capabilities which allow for multiple and cyclical use (for example, cracked wax can be heated to soften and mend itself); and constitutive materials that are inexpensive and widely commercially available.
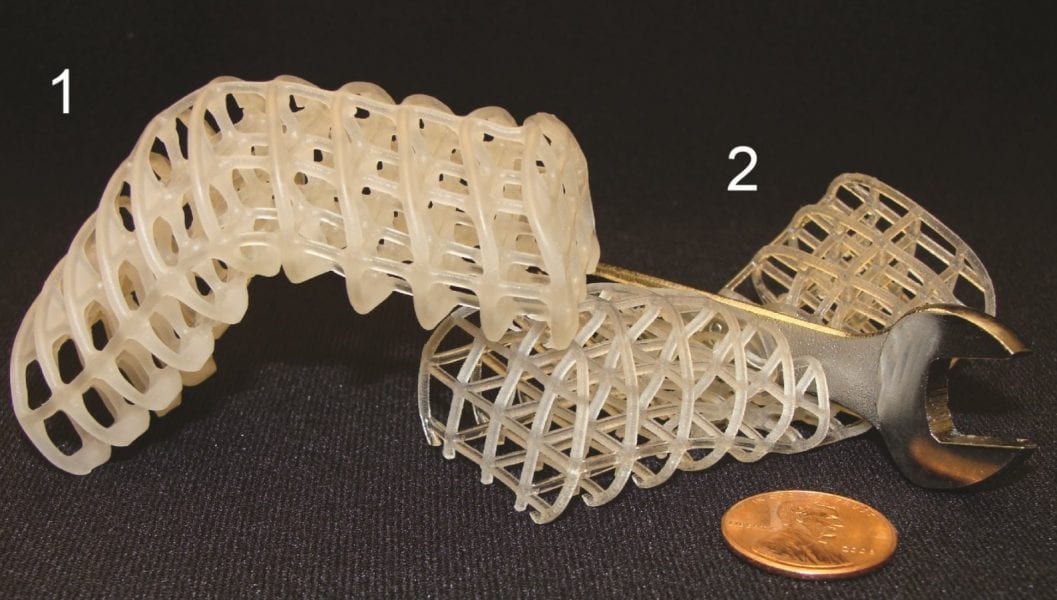
The image presents two 3D-printed soft, flexible scaffolds: “1” is maintained in a rigid, bent position via a cooled, rigid wax coating, while “2” is uncoated and remains compliant (here, it collapses under a wrench).
The present results – by researchers at Massachusetts Institute of Technology, Empire Robotics Inc., Max Planck Institute for Dynamics and Self-Organization, and Stony Brook University – focused on composites composed of two types of cellular solids: a commercial polyurethane foam and an in-house 3D-printed lattice. While the former is more practical for real-world applications due to commercial availability, the latter were studied in greater detail because they afforded more controlled sample preparation methods for studies in which the measured mechanical properties of the composites were compared with a new model to predict the effective strength of the composite.