
Robots and intelligent systems will be key factors in bringing about the next industrial revolution (Industry 4.0) by supporting the development of disruptive technologies. With a strong trend toward automation, this revolution promises to change the way we live and operate as a society.
One of the most challenging issues in developing enhanced robotic technology is making appropriate tools for the full control of liquids. While at first glance this might appear to be trivial, the precise manipulation of liquid is actually of strategic importance to many everyday procedures and facilities, such as the current global COVID-19 pandemic.
To accurately test infected individuals in a safe and precise manner, we need instruments that exhibit fast and safe handling of liquids. This comes in the form of fast, low cost, and portable microfluidic devices, which are crucial for the detection and early diagnosis. The design of innovative, easy-to-use portable devices that can manipulate small amounts of reagent and liquid to be analyzed remotely makes them a risk-free option for the medical staff working tirelessly on the front lines.
This is certainly a strategic and ambitious goal for researchers and industrial professionals around the world. However, most systems currently in use are made of rigid components, are not user friendly, must be engineered for different configurations, cannot self-adapt, and most importantly, require manual intervention by the operators (i.e., classical manual pipetting), which exposes the staff to harm and can lead to issues with cross-contamination.
Outside of just the current pandemic, liquid-manipulating systems extend to many fields with important industrial applications such as biomedicine, biotechnologies, food, chemistry, and cosmetics, to cite a few.
To build these systems, liquids, polymers, and soft matter require accurate, precise, and fully controllable systems to be handled and processed. So far, several engineering methods have been proposed to control and drive liquids in response to external magnetic, electric, or optical fields. However, until now, all the approaches proposed for locomotion and remote liquid control are complicated and very expensive.
To this end a team of researchers of the Institute of Applied Sciences and Intelligent Systems (ISASI) of the CNR have introduced a new and simple working principle for liquid manipulation and a complete exploration of the opportunities of a multipurpose platform guided by physical intelligence.
“Physical intelligence” is a new way of furnishing intelligent responses (outputs) as a function of environmental changes (inputs); in particular, this disruptive technology is based on the use of a type of functionalized material called pyroelectric material that can provide an electric field (output) as a consequence of temperature changes (input). Thus, the generated electric field is the unique element and is essential for handling and control.
The innovation lies in creating a multi-scale device for handling small amount of liquids and multi-phase samples with volumes that range from microliter to milliliter scales through temperature changes on the surface of the active material. In fact, the electric field generated by the pyroelectric effect allows one to manage the on/off function of the system in order to command a fast response in a smart way, and to easily move units of liquid with different volumes. The same technology could be integrated into lab-on-a-chip devices and implemented from micro to macro scales.
The pyroelectric platform allows researchers to manage and displace liquid unit volumes from a starting position to the desired endpoint, controlling with good resolution any intermediate step until the final position. This system will work as a simple converter that is able to transform an external thermal stimulus in a direct command for controlling liquid volume, thanks to intrinsic properties of the pyroelectric crystal operating as an active material. Thus, it avoids conventional tools such as pipettes, glass containers, and other bulky, costly, and fragile components, required in conventional handling systems.
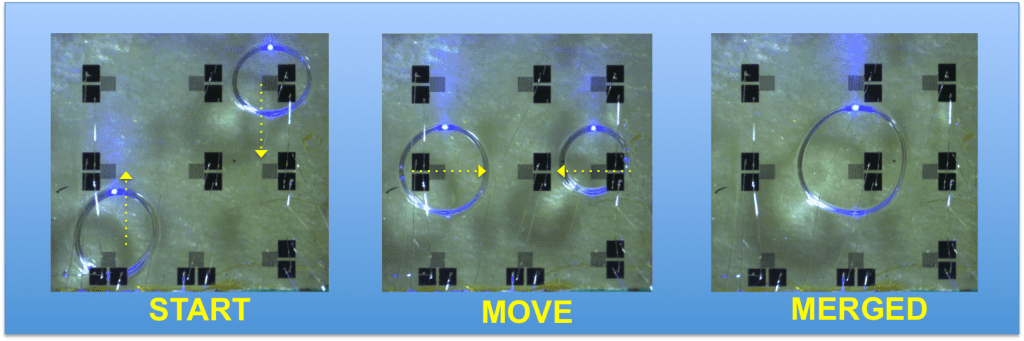
Our goal was to demonstrate remote locomotion of liquid volume as a sort of tweezers able to move liquids along desired paths. Beyond the guiding property, we proved additional functionalities like merging, stretching, mixing and jumping of liquid volumes and millimeter objects using a working distance of millimeter, i.e., bigger than the conventional distances used for liquid handling in classical digital microfluidic. Multiple volumes can be dragged over the surface, moved simultaneously and mixed in case of need. We started to show the handling capability on a 3×3 matrix but we are working on extending this configuration.
The results pave the way to an advanced liquid robotic/manipulating system applied to small liquid drops.
Liquid bridges, for example, are employed as carriers of immersed micro-objects or nanoparticles , so that controlling the movement of liquid it would be possible to move, mix, and select. We are confident that the possibility of locomotion and tweezing of liquids and particles offered by our new method in efficient handling of liquid volumes could open a new route for soft robotics, biomedicine, material science, fluid dynamic and also for application in microgravity environment, where it is well known that the managing of liquid is difficult and have safety concerns.
Further study will be focused on developing an upgraded platform that is able to cover even bigger distances and with optimized external stimulus for activating liquid command in order to improve precision in all tasks. Such optimization could improve all the related technologies such as ink-jet printing, pyro-inkjet printing, micro-and nano-materials processing, drug delivery, biomedical applications, and cell manipulation. Furthermore, it can be said that the new approach will be one of the most promising candidates as a key enabling technology for lab-on-a-chip devices, which many believe will revolutionize medicine.
Written by: Sara Coppola and Pietro Ferraro, CNR ISASI Applied Sciences and Intelligent Systems
Reference: Giuseppe Nasti, et al. ‘Pyroelectric Tweezers for Handling Liquid Unit Volumes.’ Advanced Intelligent Systems (2020). DOI: 10.1002/aisy.202000044









