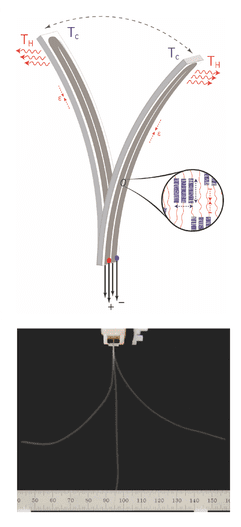
Top: By heating one side of the actuator, the amorphous chains (red lines) shrink in length and the crystalline regions (blue lines) expand in volume. The result is surface contraction of the beam at its heated surface which creates the bending motion. Below: Image of a nylon beam reversibly bending.
Artificial muscles have been made from various types of materials, but few systems have a good combination of performance parameters such as contractile stress, cycle life, low cost, efficiency, and movement controllability.
Nylon fibers, like high performance fishing lines and sewing threads, have recently shown promise as they exhibit anisotropic thermal expansion behavior, which enables relatively large linear tensile actuation (up to 49%) when the fibers are highly twisted and coiled. They are also inexpensive. However, one of their drawbacks is that they function by converting the linear motion of the twisted-coil nylon fibers to a bending motion, which requires a large space for storing the linear actuator.
Now, in Advanced Materials, Seyed Mirvakili and Ian Hunter from the Massachusetts Institute of Technology, USA, present an approach to make artificial muscles with nylon that bend, controllably, in any direction. They use the nylon actuator itself to bend, by adapting the cross-section of the fibers and the heating regime, thus eliminating the need for a mechanical transmission mechanism, and the space for storing long linear actuators. This makes scalability and controllability much easier.
Nylon beams made from highly oriented nylon filaments achieve a displacement-to-length ratio of 125%, but with a low output force. This combination has many potential applications, in devices such as surgical tools, toys, clothes or shoes that bend to fit, or smart windows.