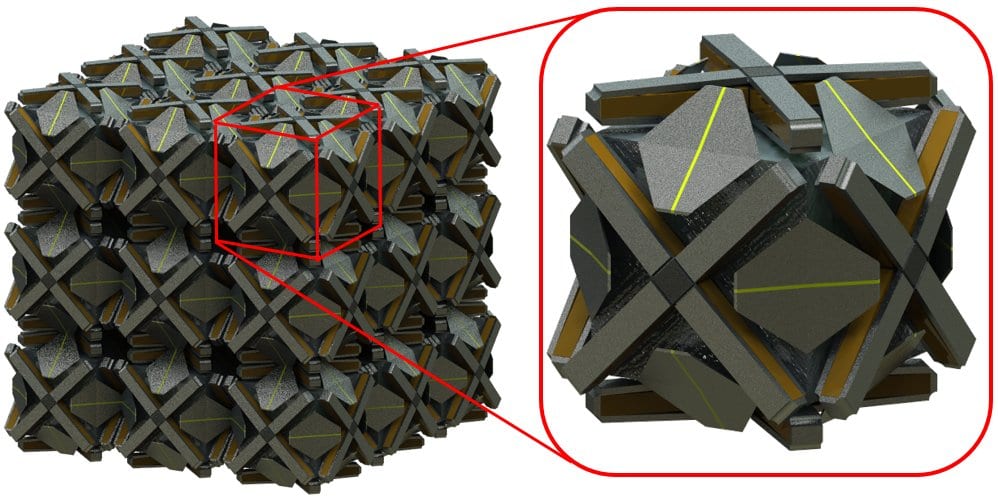
 The aim of this work by J. B. Hopkins et al. is to introduce a new microarchitectured material that consists of a large periodic lattice of small compliant unit cells that are independently controlled using piezo actuators, sensors, and microprocessors embedded within each cell. This material exhibits desired bulk mechanical properties according to control instructions that are uploaded to the material’s microprocessors.
The aim of this work by J. B. Hopkins et al. is to introduce a new microarchitectured material that consists of a large periodic lattice of small compliant unit cells that are independently controlled using piezo actuators, sensors, and microprocessors embedded within each cell. This material exhibits desired bulk mechanical properties according to control instructions that are uploaded to the material’s microprocessors.
Unlike most microarchitectured materials that passively exhibit their bulk properties based solely on their microstructure’s topology and constituent material properties, the proposed material actively exhibits its properties primarily from its internal piezo actuators, which are driven according to the aforementioned control instructions. Thus, if designers wish to achieve different combinations of desired properties (e.g., Young’s Modulus, Poisson’s ratio, density, and damping coefficient), they do not need to redesign or refabricate the mechanical infrastructure of their initial design, but can simply reprogram and upload new control instructions to the existing design such that the different combinations of bulk lattice properties can be achieved. And, since such control instructions can be altered and uploaded in real-time using a centralized master controller, desired combinations of properties can be actively and continuously tuned or maintained over appreciable deformations on demand.
The proposed material can also achieve extreme mechanical properties that cannot be achieved by naturally occurring materials, composites, or other passive microarchitectured materials because the proposed material is energized by a power source (e.g., batteries or an external power line) that can significantly amplify the material’s response to mechanical loads.
A number of advanced applications would be impacted by this material. Such applications include (i) vehicle frames that selectively alter their stiffness and damping properties at desired locations according to changing wind or road conditions for improving the smoothness of the ride and for increasing the vehicle’s overall fuel efficiency, (ii) endoscopic tools that become compliant in certain areas as they maneuver through a body but stiffen in other areas when rigidity is required for cutting or deploying an end effector to perform a particular surgical procedure, (iii) knee, hip, or ankle braces and prosthetics that can actively damp the impact of running or jumping to reduce injury and/or enhance natural performance by changing the stiffness of the material at key moments to optimally convert strain energy to kinetic energy, (iv) a material that can be programmed to amplify, attenuate, and/or redirect sound as desired, and (v) sensory coatings on the surfaces of vehicles that can store memories pertaining to where, when, and by how much the vehicle’s surface was deformed or impacted during operation to assess if and where potential damage has occurred. These coatings could also be made to reenact their deformation sequence if desired.