The field of robotics is constantly progressing towards autonomy, so advanced tactile sensors are critical in enabling safe and dexterous interactions between the robot and its environment.
In the past, considerable progress was made in the field of tactile sensing. For example, camera-based tactile sensors are able to achieve microscale spatial resolution but are unfortunately limited to a small sensing area. Other tactile sensors, which have a larger sensing area, often have limited flexibility. Therefore, there is an urgent need for flexible, large area tactile sensor arrays that are capable of shear force sensing.
In this Advanced Materials Technologies article, Alexi Charalambides and Sarah Bergbreiter demonstrate for the first time a rapid manufacturing process and taxel geometry to create a large area, all-elastomer robot skin. This robot skin is the size of an adult human hand and features 12 contact resistance taxels with 41 electrical leads. Using these taxels the skin can detect normal and shear loads over a large area. This work presents an essential contribution to accelerating the pace of elastomer-based sensor research.
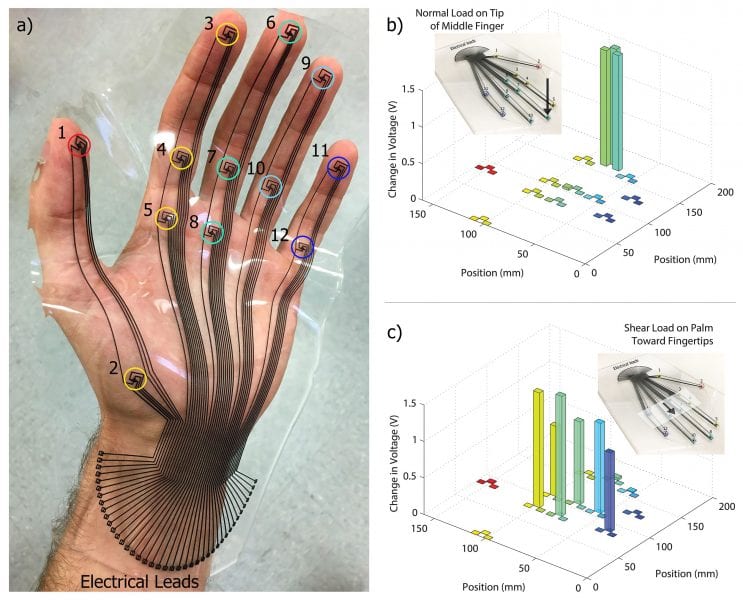
a) Robot skin covering an adult hand consisting of 12 contact resistance taxels with a total of 41 electrical leads. Taxels can sense shear and normal forces, and have features as small as 30 µm. b) Change in voltage of the robot skin when subjected to a normal load applied to the tip of the middle finger (taxel 6). Each pad at the taxel of interest changes in voltage with roughly the same magnitude. c) Change in voltage of the robot skin when subjected to a shear load toward the fingertips that was applied to the palm area (taxels 4, 5, 7, 8, 10, and 12). Pads in the direction of shear loading change in voltage while other pads remain relatively unchanged.