 Soft pneumatic actuators (SPAs) are compliant, elastomer-based actuators that enable safer human-robot interaction in a variety of applications, including wearable systems, versatile locomotion, robotic grasping, and biomedical rehabilitation, with diverse design and material options. In principle, SPAs are built as an array of inflatable chambers producing a predefined displacement by establishing the geometric constraints and anticipating the material properties.
Soft pneumatic actuators (SPAs) are compliant, elastomer-based actuators that enable safer human-robot interaction in a variety of applications, including wearable systems, versatile locomotion, robotic grasping, and biomedical rehabilitation, with diverse design and material options. In principle, SPAs are built as an array of inflatable chambers producing a predefined displacement by establishing the geometric constraints and anticipating the material properties.
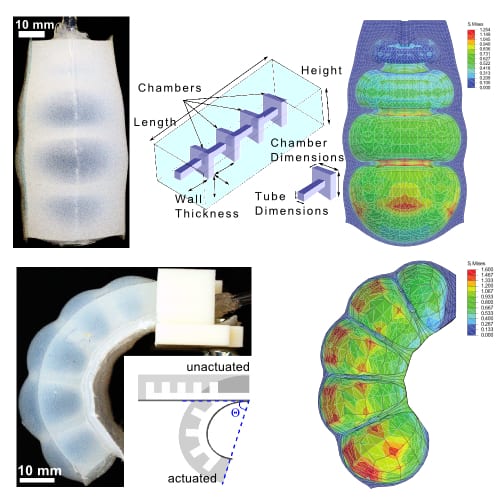
This work by Jamie Paik and co-workers from Ecole Polytechnique Federale de Lausanne presents a design tool for SPAs using finite element method (FEM) adaptable to a diverse range of soft materials and design parameters: to demonstrate, we analyzed Ecoflex® 00–30 in detail. This manuscript reports two types of SPAs and their typical displacement and blocked-force profiles that are simulated and validated with experimental testing. The efficacy of the tool is examined with two real-world case studies: the rehabilitative glove and rodent exoskeleton. Two SPAs were prototyped and tested based on the optimized parameters generated from the developed design tool to meet the application specific performance criteria and geometric constraints.
The Reconfigurable Robotics Lab’s research focuses on design, actuation, fabrication, and control of unique interactive robotic systems with novel fabrication techniques and integration processes that push the limits of mechanical properties. The design tool introduced here, available in open source format, allows complete automation of the mechanical modeling, simulation and parameterization procedures of SPAs with given input material properties, and accurately captures complex mechanical effects induced in soft materials, capable of enduring large deformations under load. This research and the presented design tool will empower researchers and engineers studying soft materials for new actuation methods with a faster, more reliable, and efficient design procedure.